自动驾驶与车路协同
领域:自动驾驶与车路协同、高精度地图导航
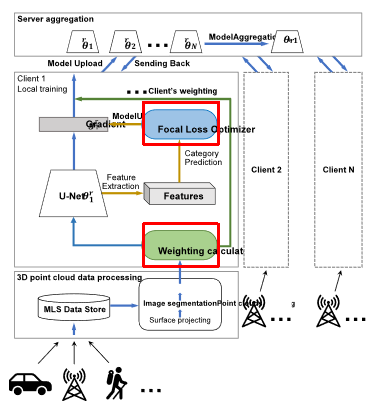
任务描述:实现点云数据中各类道路标识提取(车道线、转向箭头、斑马线)
痛点:激光扫描成本高、自动驾驶公司之间商业机密不共享(数据、算法)
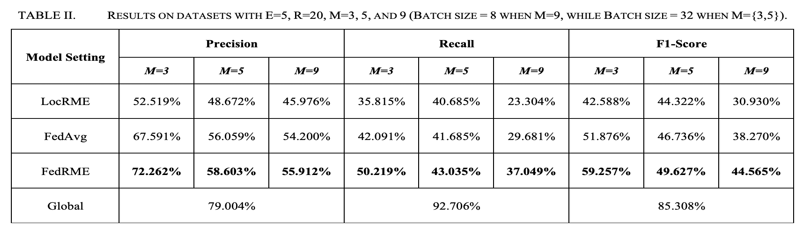
效果:比FedAvg精度提升7.9%
任务描述:实现点云数据中各类道路标识提取(车道线、转向箭头、斑马线)
痛点:激光扫描成本高、自动驾驶公司之间商业机密不共享(数据、算法)
效果:比FedAvg精度提升7.9%
平台应用
Platform application
Liang Chen, Xiaoliang Fan*, Haibing Jin, Xiaotian Sun, Ming Cheng, Cheng Wang, FedRME: Federated Road Markings Extraction from Mobile LiDAR Point Clouds, The 2022 IEEE 25th International Conference on Computer Supported Cooperative Work in Design (IEEE CSCWD 2022), May 4-6, 2022, Hangzhou, China, Accepted on January 31, 2022.
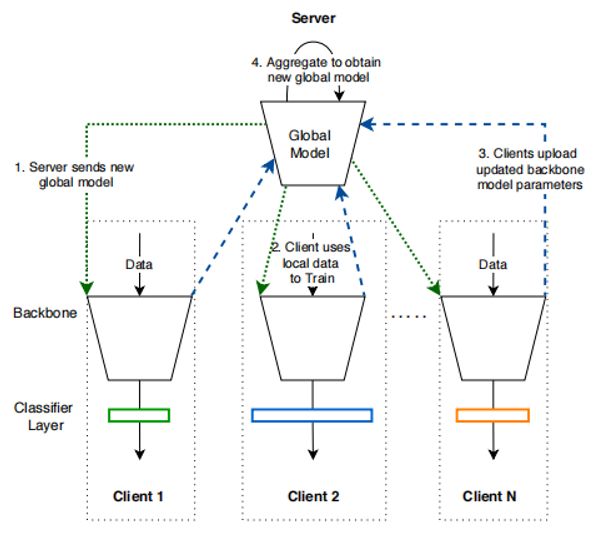
算法步骤:
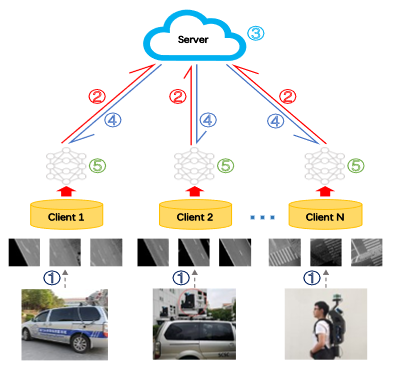
① 点云数据预处理
② 本地模型训练及上传
③ 服务器聚合模型
④ 服务器更新全局模型并分发
⑤ 本地更新模型
① 点云数据预处理
② 本地模型训练及上传
③ 服务器聚合模型
④ 服务器更新全局模型并分发
⑤ 本地更新模型
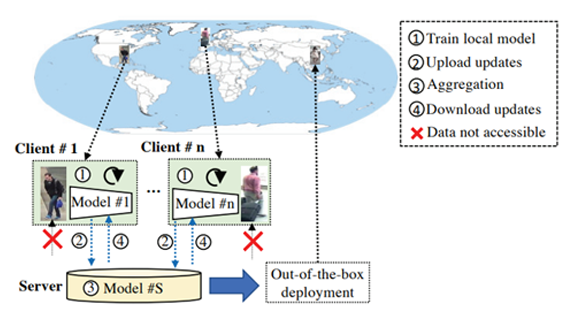
城市目标识别与提取(FedReID)
任务描述:城市中不同摄像头对同一目标的重识别
痛点:城市中不同摄像头之间对同一目标的识别与追踪
领域:城市视频监控
痛点:城市中不同摄像头之间对同一目标的识别与追踪
领域:城市视频监控
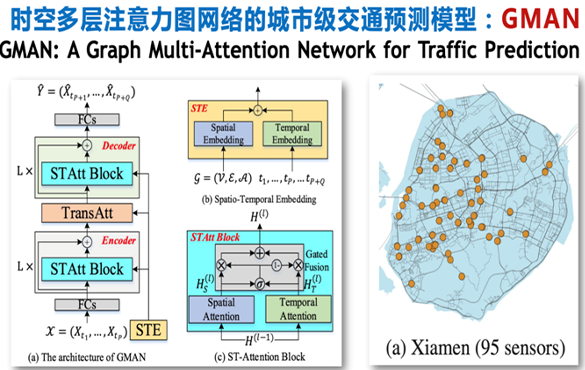
城市交通联邦态势感知预测(FedGMAN)
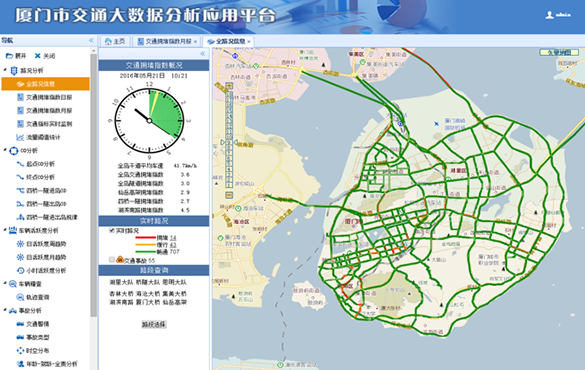
系统功能:实时路况、短时交通流量预测、拥堵指数
实战成效:支撑交管部门各类系统调用1万+次/月
实战成效:支撑交管部门各类系统调用1万+次/月
算法支撑(AAAI-20):1小时的路网级流量预测精度全球领先(厦门84.16%,美国95.69%)
Google学术论文引用210+次
Google学术论文引用210+次